Today we checked the picomotors of the suspension in the PR chamber (a part of the filter cavity telescope).
The suspesion is equipped with 5 picomotors and 2 piezo.
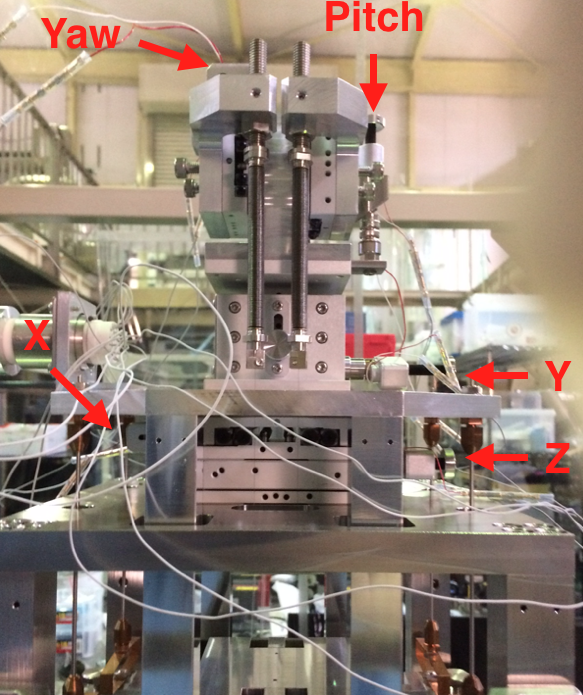
Starting from the top (see attached picture):
1° stage:
- YAW (orizontal) + piezo
- PITCH (vertical) + piezo
2° stage:
- Y (defined as the vertical translation of the mirror)
3° stage:
- Z (defined as traslation along the beam axis ( perpendicular to the mirror))
- X (the left one)
In order to control the picomotor we have used as out-of vacuum cable the original cable used for the double pendulum suspension in NM1.
Pinout: http://tamago.mtk.nao.ac.jp/tama/ifo/www_suspension_install_status/burndy.jpg (we are not sure that our definitions of X, Y, Z agree with that reported in this link)
{kind=link}
There are two cables (with 6 pins) coming out from the connector, repectively named EF ALIGNMENT and EF LENGTH. We have connected them to the picomotor driver and checked the degree of freedom controlled by each of them.
NB: each cable can move 3 picomotors, which using the hand-pad convention are named A, B, C.
Here what we found:
EF ALIGNEMENT
- A: PITCH
- B: YAW
- C:
EF LENGTH
- A: Z
- B: X
- C: Y
We checked that all the picomotors work in both directions.