KoheiMitsuhashi - 19:10, Wednesday 20 September 2023 (3323)
measured the transfer function of double pendulum made by inverted pendulum and Roberts' Linkage
I made double pendulum made by inverted pendulum and Roberts' Linkage.
So I measured the transfer function from IP actuator power to IP displacement and Roberts' Linkage displacement to check how it is.
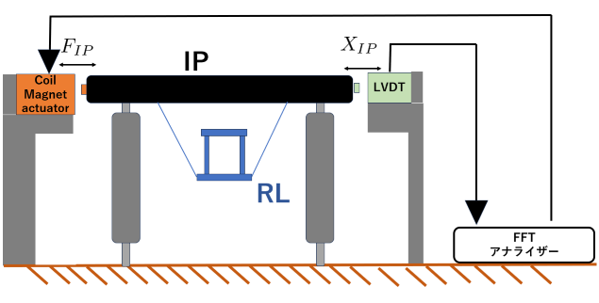
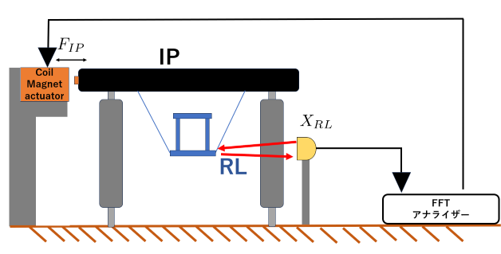
Each set up pictures are attached(Fig1, Fig2).
IP displacement are measured by LVDT mounted on IP top stage.
Roberts' Linkage displacement are measured by photo displacement sensor.
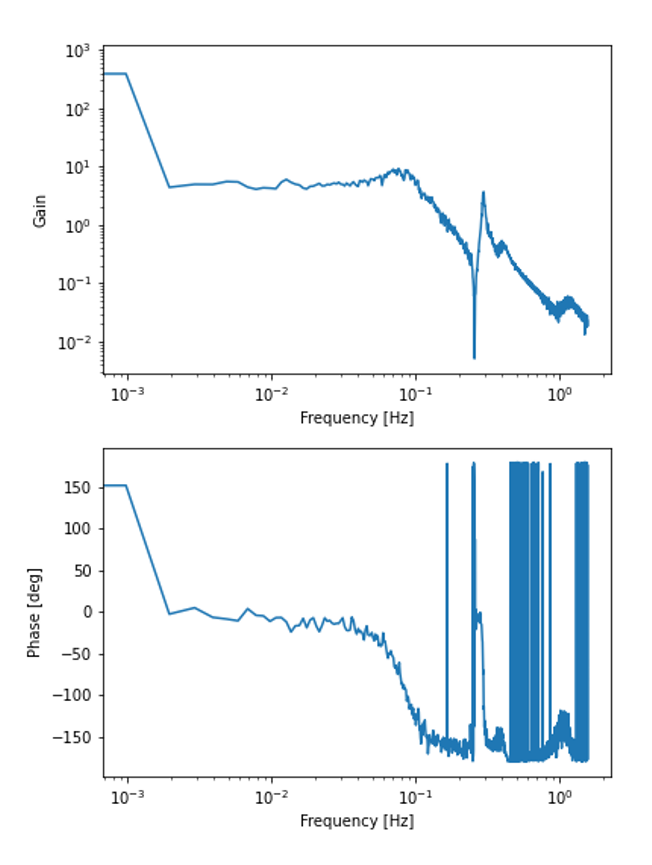
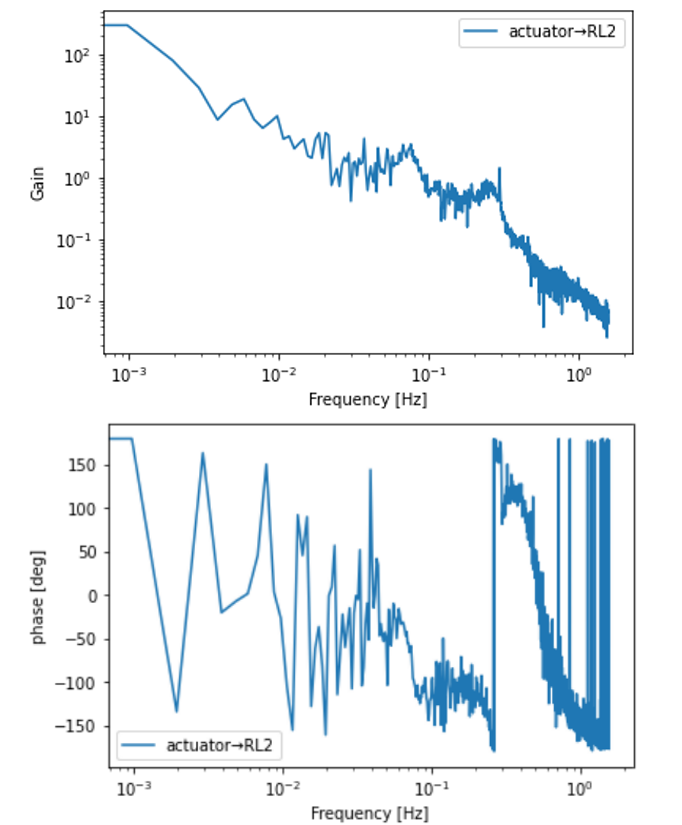
Each transfer function are attached(Fig3, Fig4).
From Fig3 gain plot, I can realzed that common mode and differrential mode peak and characteristical dip.
I can also realized that points from Fig3 phase plot.
At 400mHz peak is IP yaw motion, and at 1Hz peak is Roberts' Linkage paw motion.
I mentioned about Fig4 lately.
Images attached to this report