Marc, Michael and Yuhang
The pointing loop control precision is an important parameter, which tells us the light beam spot moving range on filter cavity end mirror. The beam pointing loop is a very slow loop. To measure this beam pointing precision, we need to measure the error signal of this loop.
1. Calibration
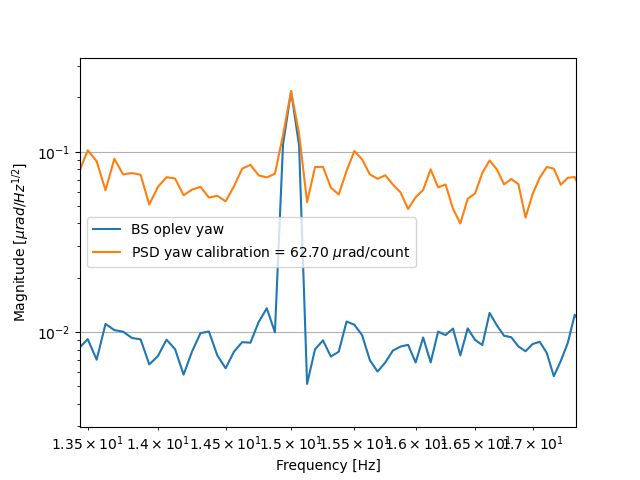
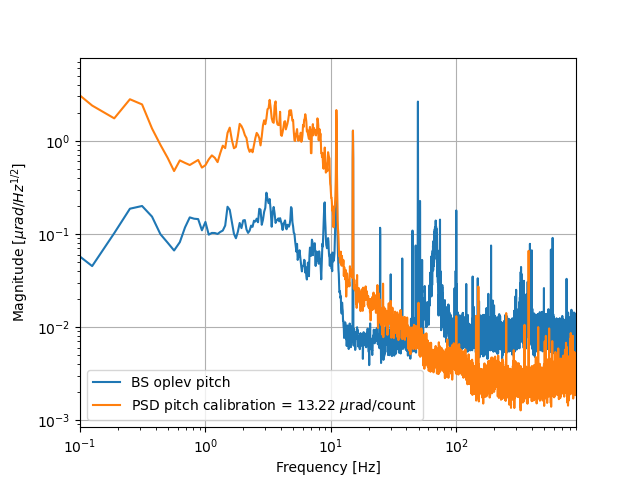
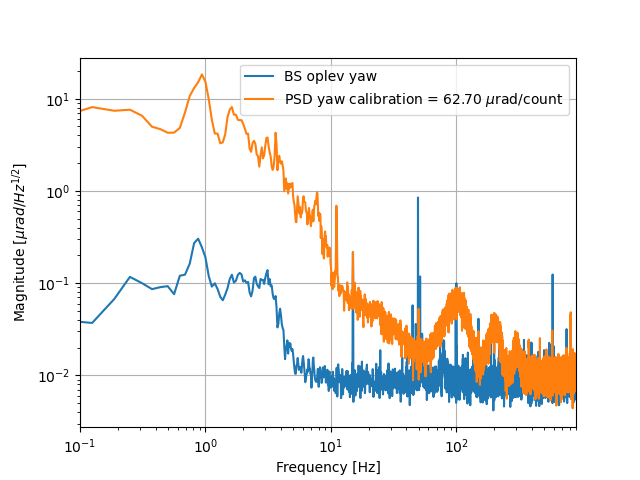
We did calibration by sending a line for BS pitch/yaw. By overlapping BS oplev signal line and FC transmission PSD line, we can calibrate PSD pointing to the base of BS. The BS oplev calibration is from Eleonora elog1874. Attached figure 1 and 2 show this overlap and the calibration factor of PSD.
2. Pointing precision
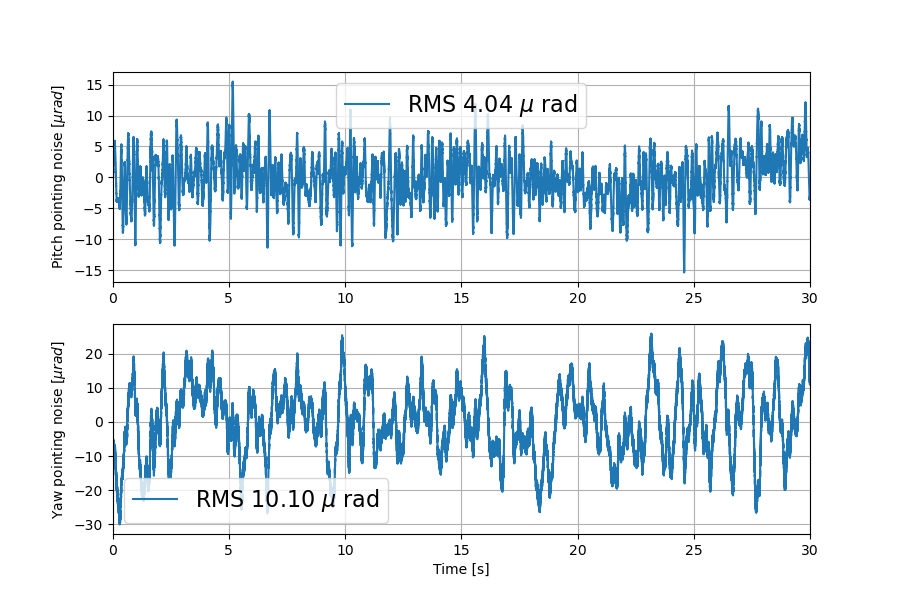
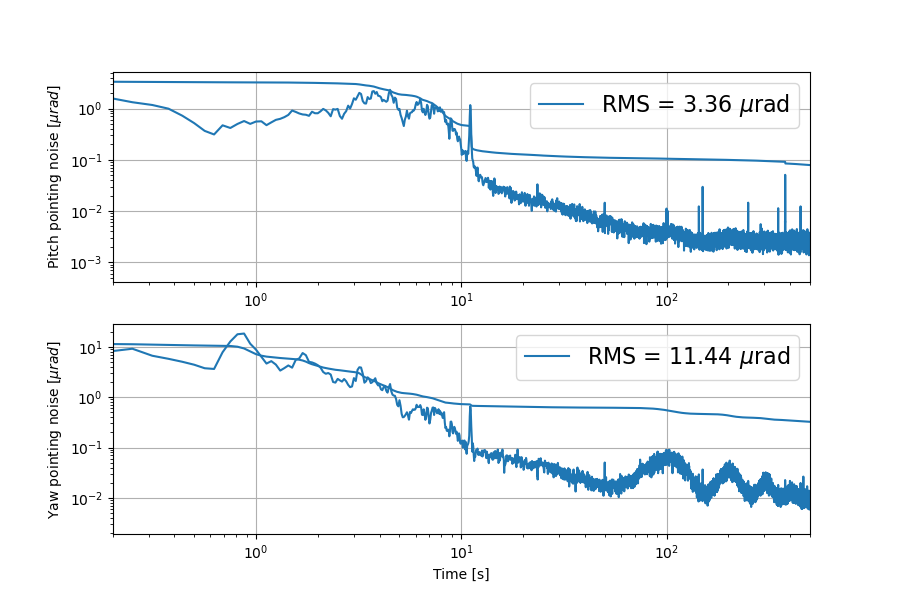
We took time series and spectrum of pointing loop error signal. By using calibration factor, we found our pointing precision for pitch is 4.04urad, for yaw is 10.10urad (from time series measurement). From spectrum measurement, pitch precision is 3.36urad, yaw precision is 11.44urad.
Remarks:
1. This measurement is done with PR and BS oplev open. Now the PR/BS oplevs are noisy above 10Hz, the closing of oplev loop may introduce noise but the resonance peak should be anyway reduced. It will be interesting to compare the pointing noise when PR/BS oplev is on/off.
2. This measurement is doen when BS pointing is closed. It has been found that pointing introduces noise for BS oplev when pointing loop acts on BS. So it will also be interesting to do the same measurement when pointing loop acts on PR.
3. Attached figure 5 and 6 show the comparison of BS oplev pitch/yaw and FC transmission PSD pitch/yaw. We can see PSD signal is higher than oplev after calibration, which means there are other noise sources are dominating PSD signal instead of BS pointing.
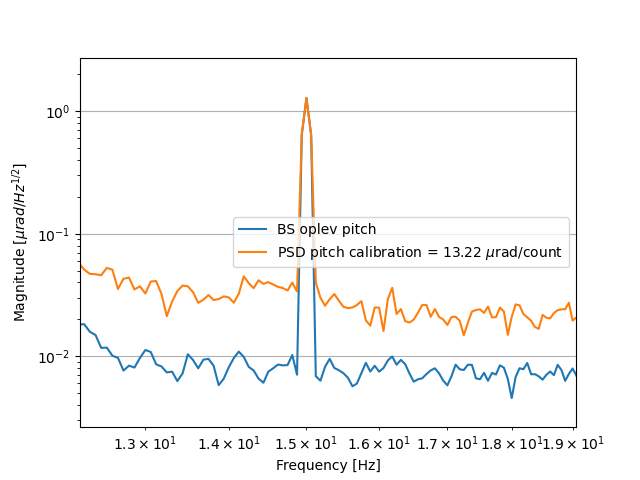
This 15Hz peak can be also amplitude noise.
To better calibrate, probably we should move slowly the pointing loop offset and see how much BS oplev signal response.
Marc, Michael, and Yuhang
We have done a calibration for pointing loop with a new method. We move the locking point of pointing loop and check how much BS needs to compensate.
Pointing pitch:
we move pointing pitch, as attached figure 1 [1,0] subplot, from -24 to -34 [counts]. Then we found BS pitch, as attached figure 1 [0,0] subplot, needs to move from 275.8 to 326.0 [counts] to compensate. Taking into account the calbration of oplev, we got calibration factor for pointing loop on the base of BS.
The pointing precision was estimated by a RMS integral of pointing loop error signal spectra. We also found that high frequency spectrum can be better if we center beam on PSD, which is shown in attached figure 1 [0,1] and [1,1] subplots. However, the RMS of these two seneriaos are the same, which is reasonable since the dominating noise is at low frequency. In conclusion, we got pitch pointing precision as 0.43urad.
pitch pointing loop calibration factor 1.3 urad/count.
Pointing yaw:
We have done the pointing yaw calibration in the same manner with pointing pitch. The details can be found in attached figure 2. In conclusion, we got yaw pointing precision of 0.65urad.
yaw pointing loop calibration factor 1.5 urad/count.
Note: to take a quicker measurement, we have increased pointing loop gain by factors of 3 and 5 for pitch and yaw. So you can see the BS compensation finishes within 1 minute. We have also tested the spectrum of poiting pitch/yaw don't show difference when gains are increased.