YuhangZhao - 15:21, Wednesday 19 August 2020 (2173)
Characterization of the four driving magnets for END mirror
Eleonora and Yuhang
Since the problem of AA's pitch/yaw coupling is more severe when END mirror is driven, we decide to check the driving/control of END mirror.
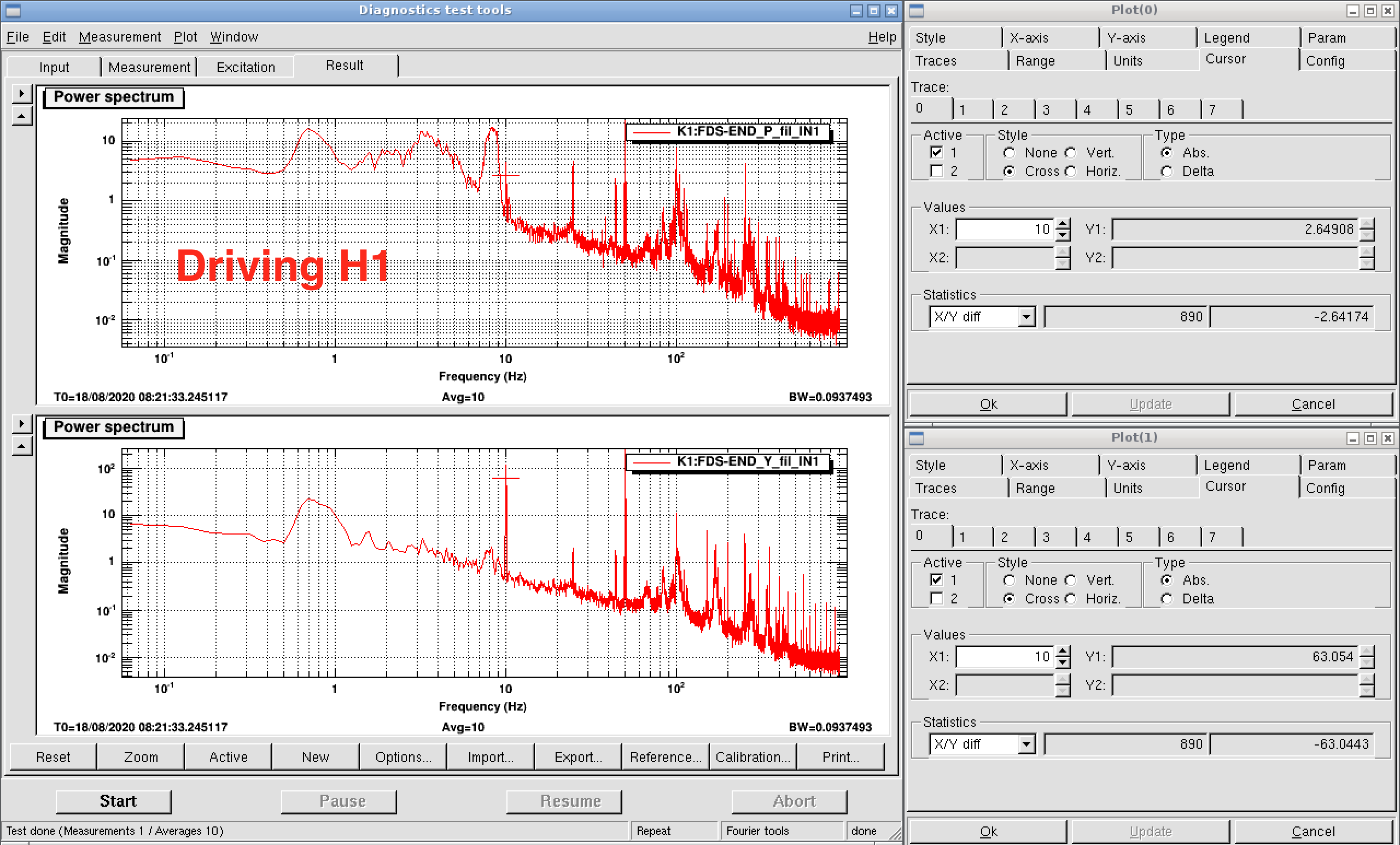
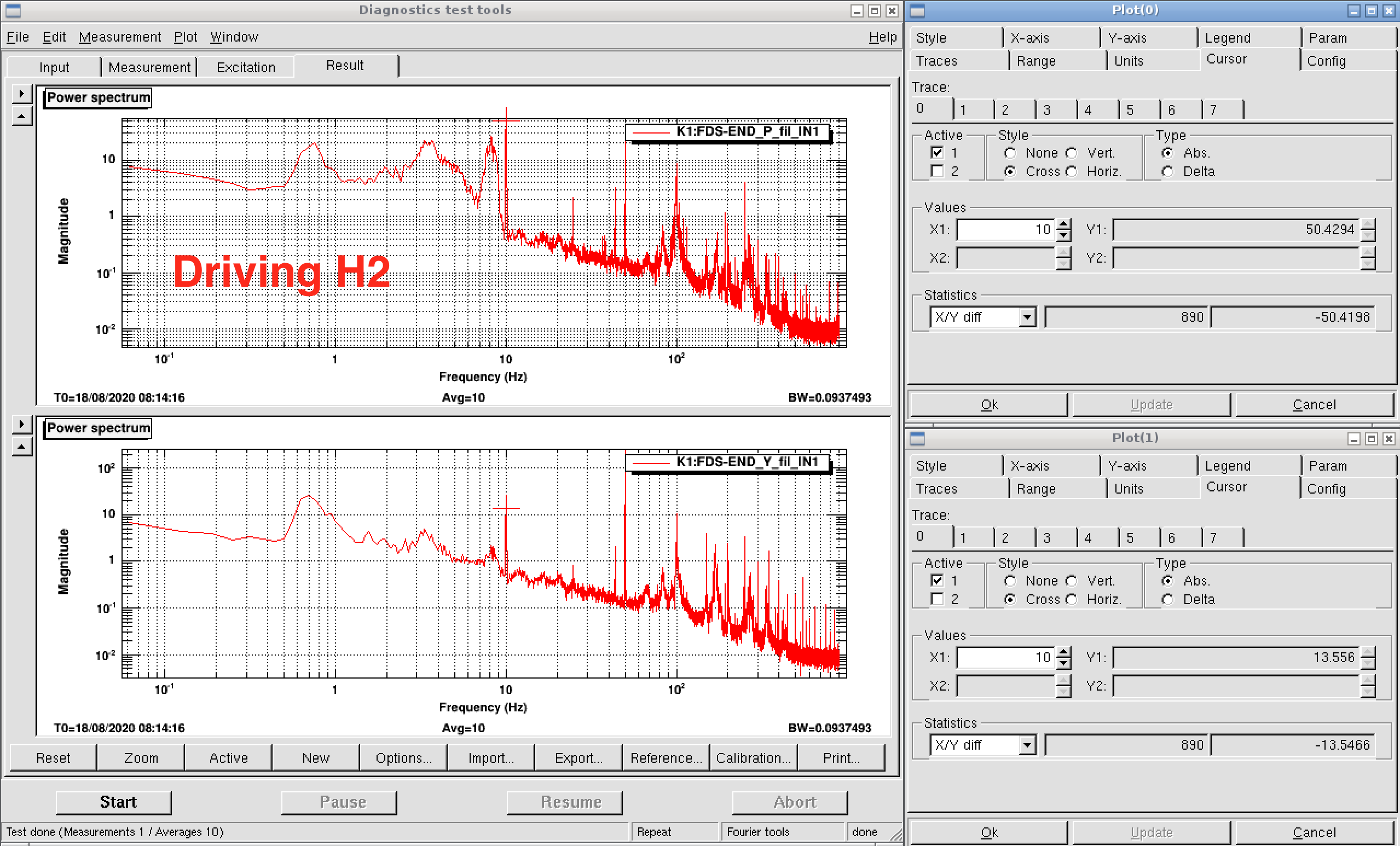
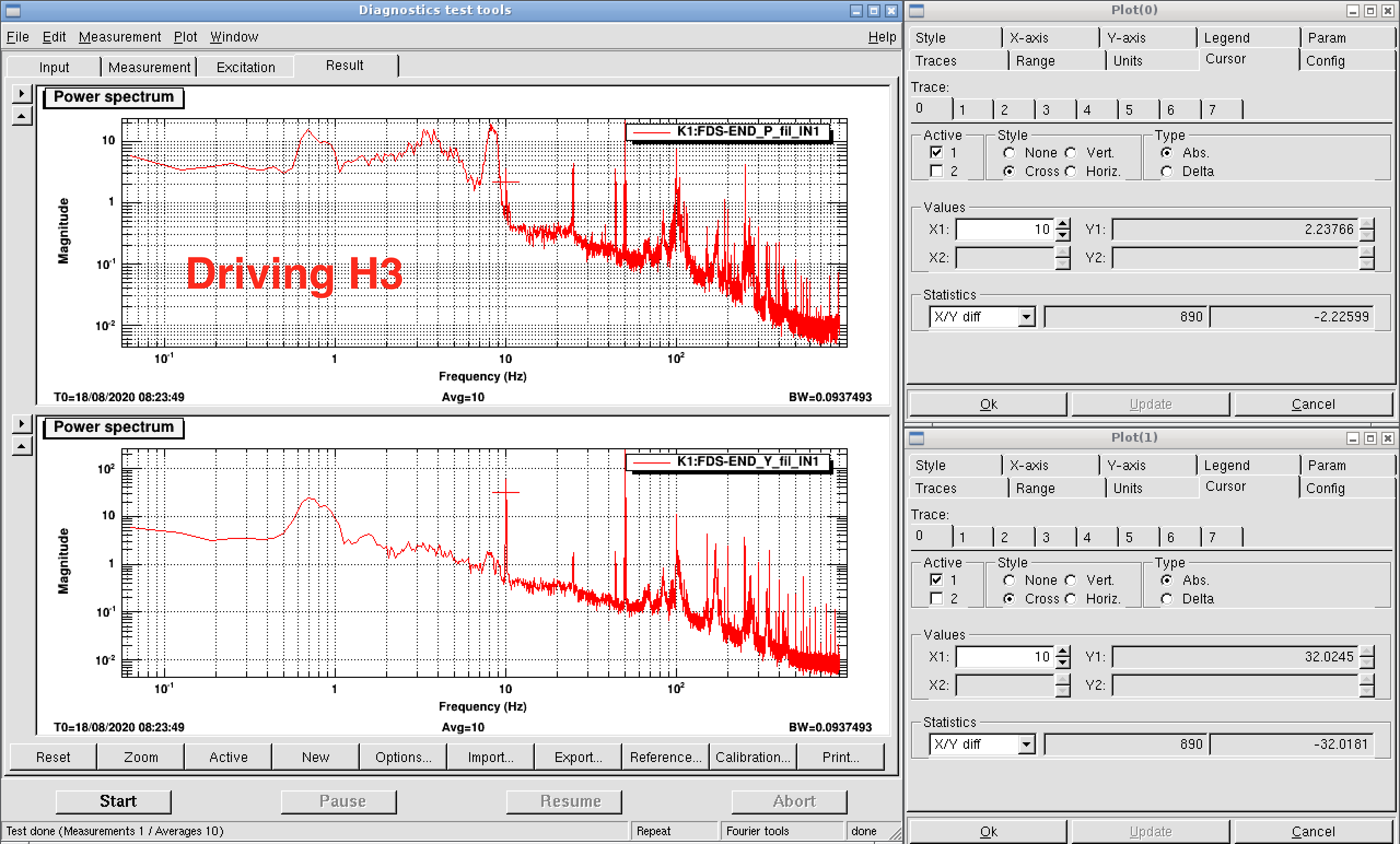
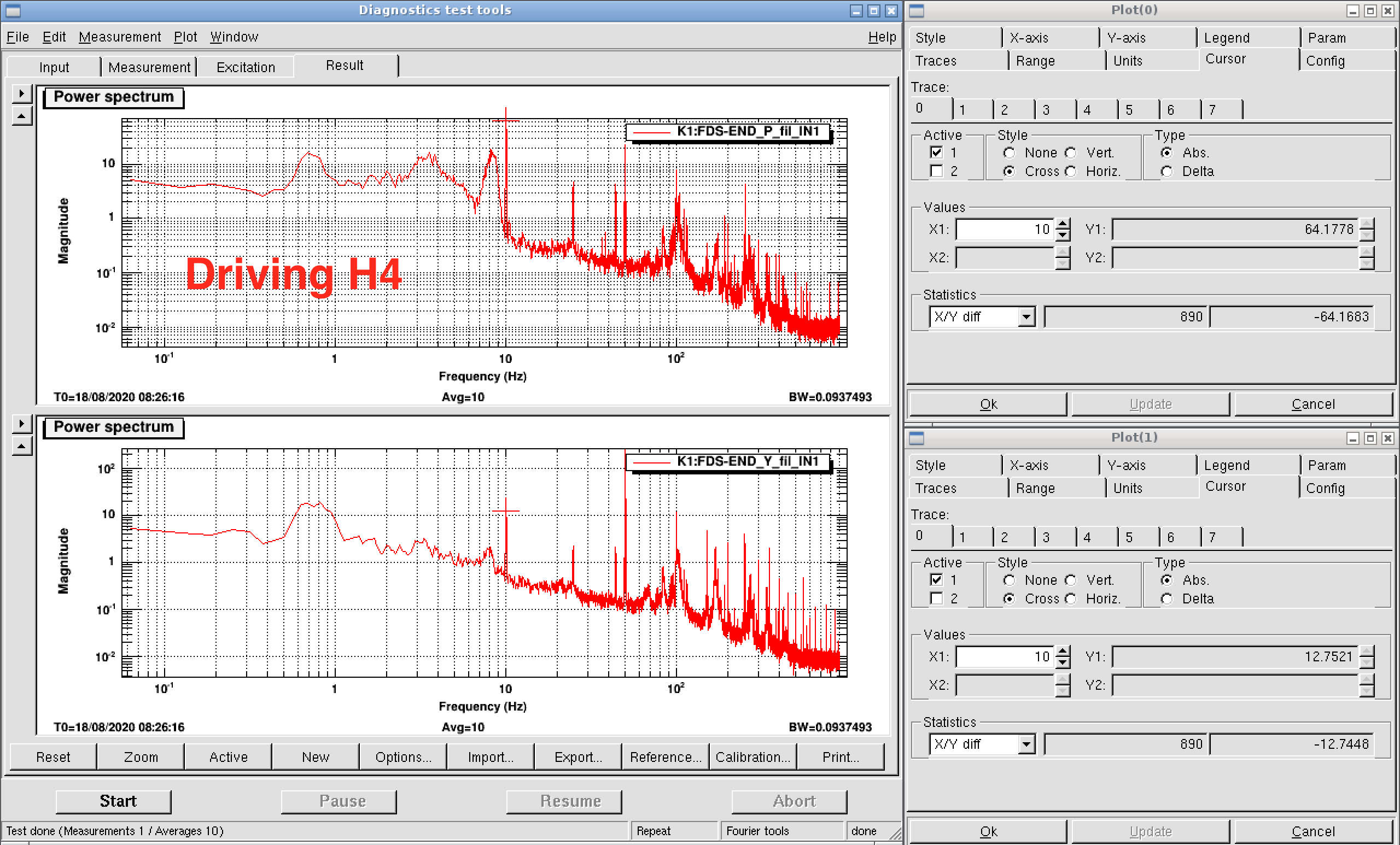
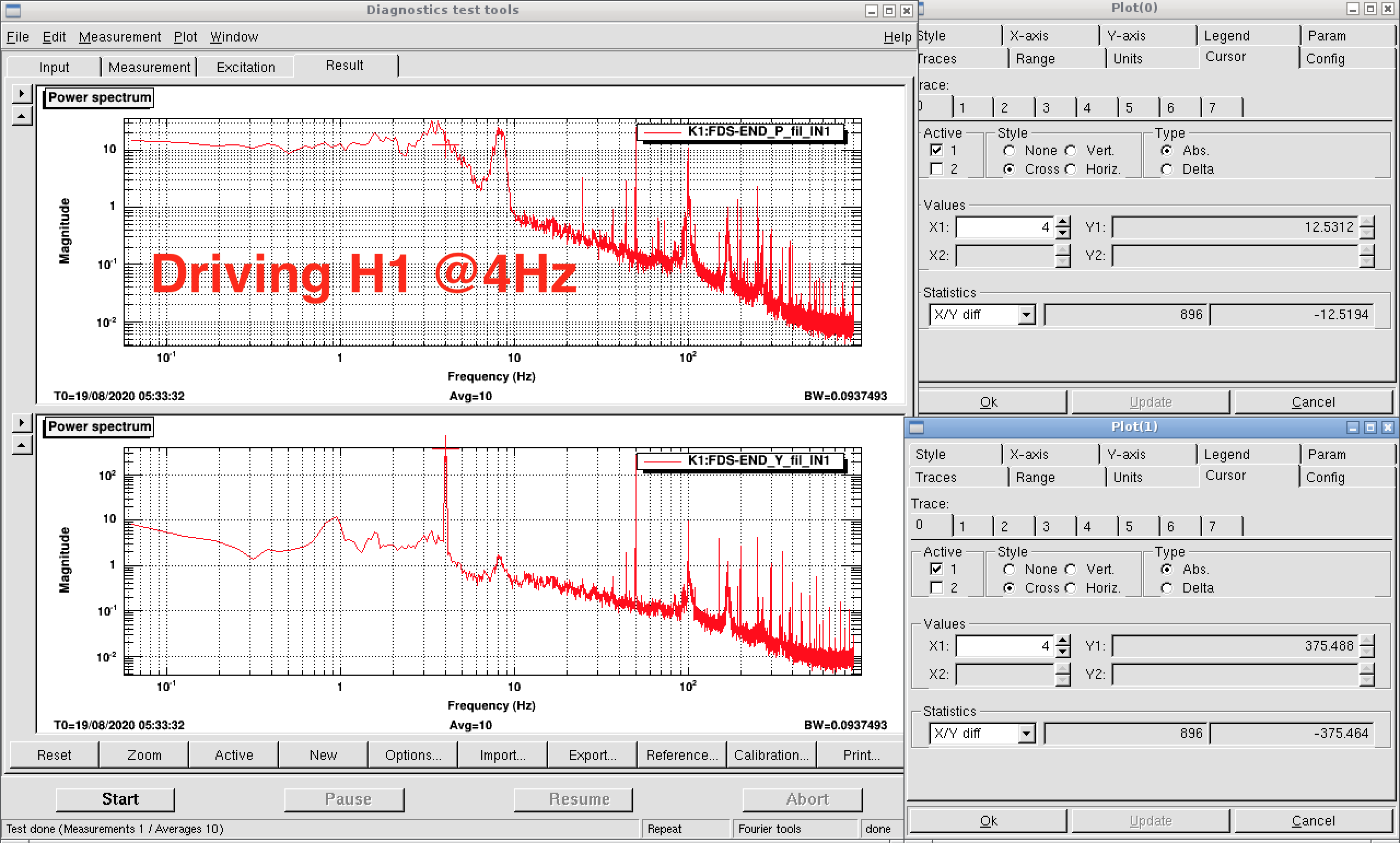
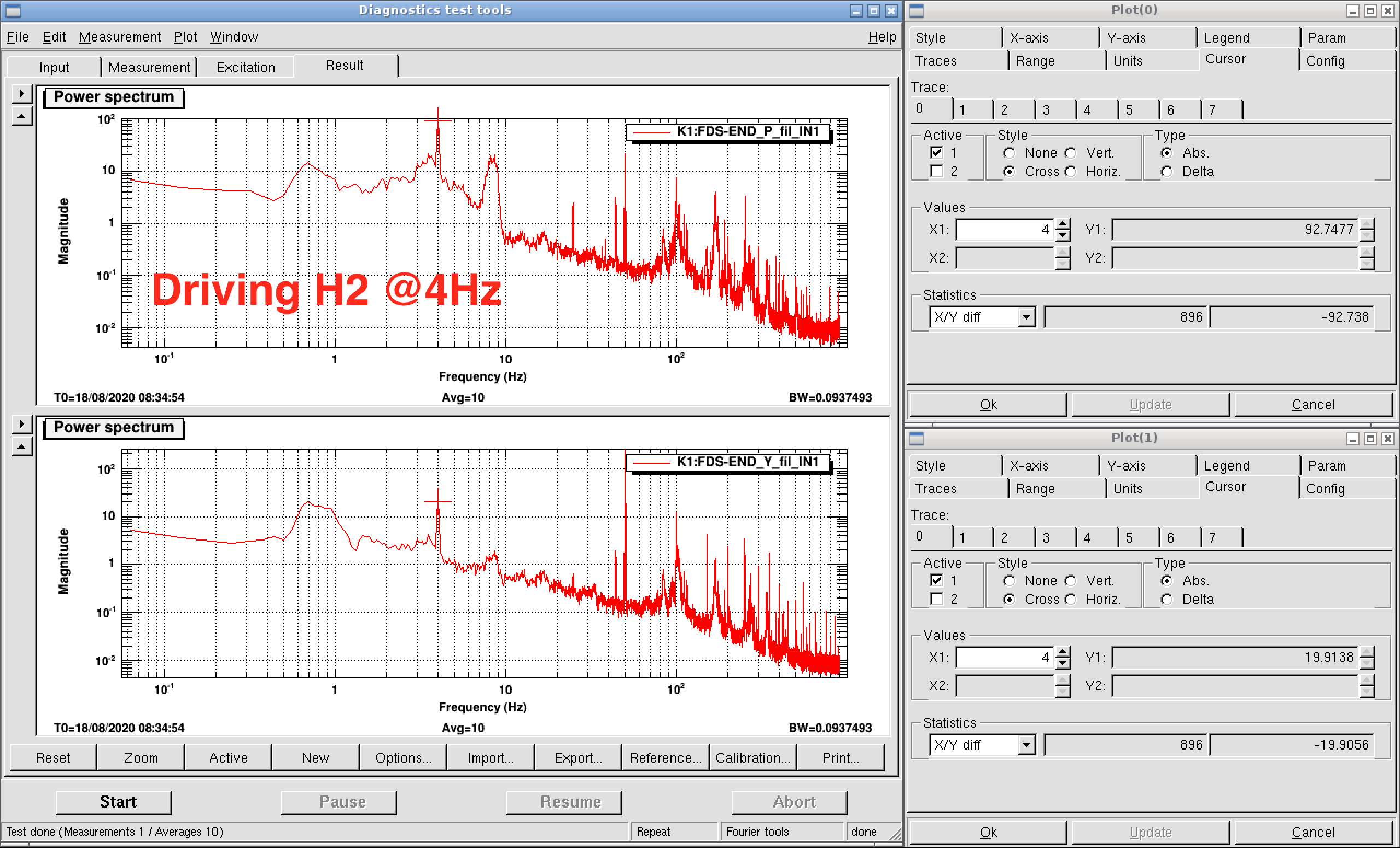
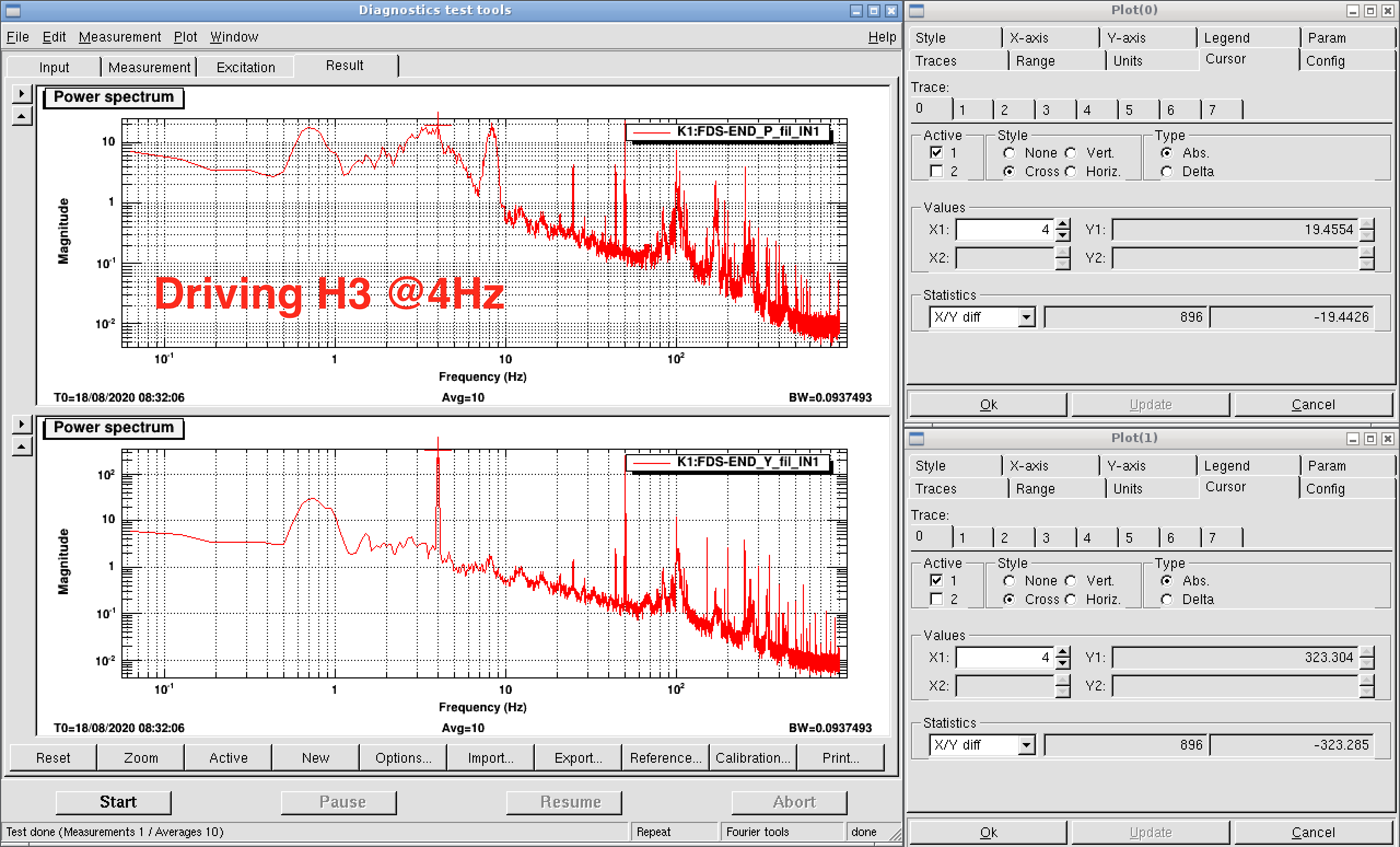
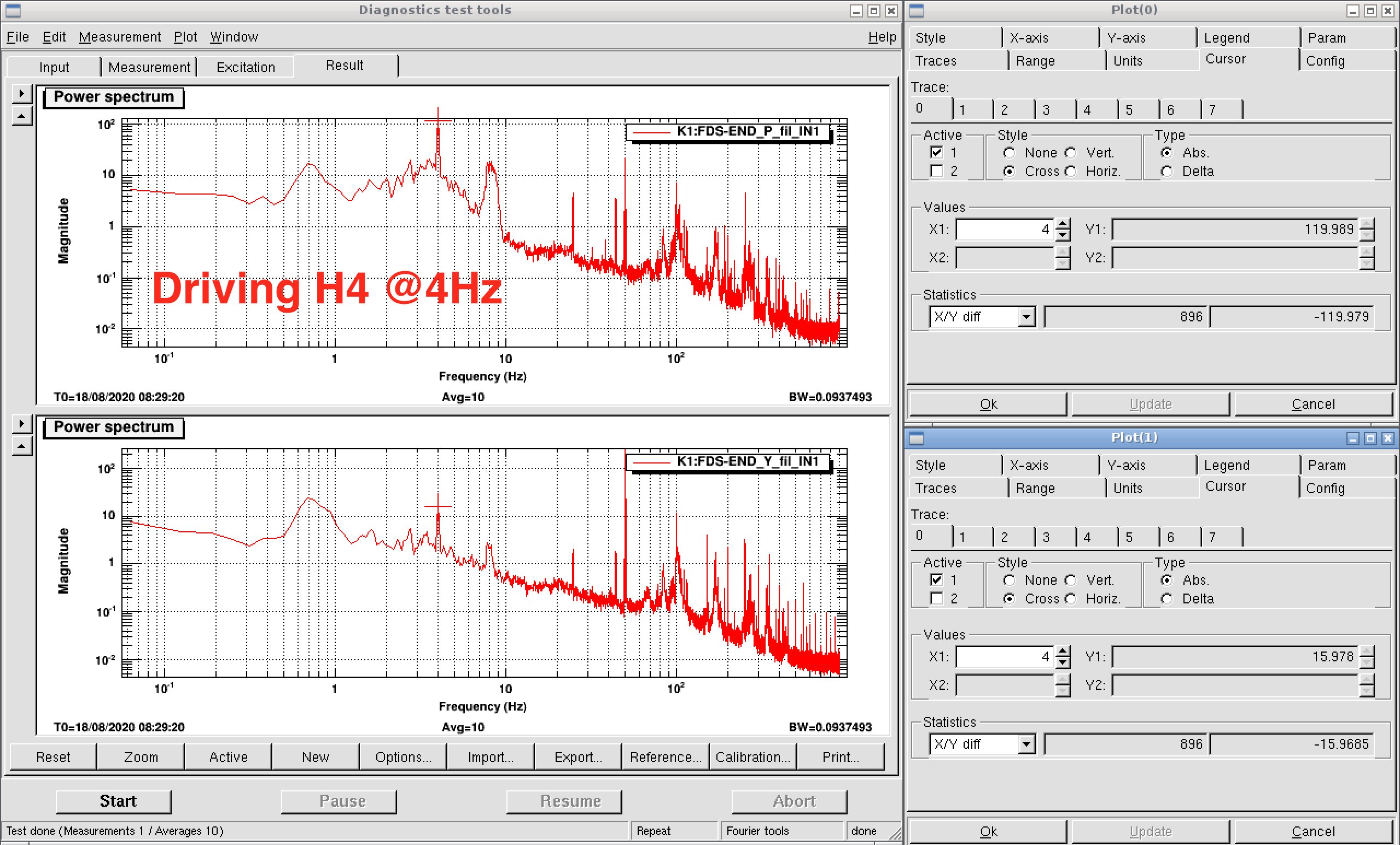
1. The first test was to check the pitch/yaw motion peak with oplev when one set of coil/magnet is driven. The test was done for 4Hz and 10Hz. (figure 1-8)
| H1(pitch/yaw) | H2(pitch/yaw) | H3(pitch/yaw) | H4(pitch/yaw) | |
| 10Hz | (3,63) | (50,14) | (2,32) | (64,13) |
| 4Hz | (13,375) | (93,20) | (19,323) | (122,16) |
Therefore we can derive
| driving difference H1/H3 | driving difference H2/H4 | |
| 10Hz | ~2:1 | ~5:6 |
| 4Hz | ~1:1 | ~5:6 |
| H1 coupling to pitch | H2 coupling to yaw | H3 coupling to pitch | H4 coupling to yaw | |
| 10Hz | <5% | 28% | 6% | 20% |
| 4Hz | <4% | 22% | 6% | 13% |
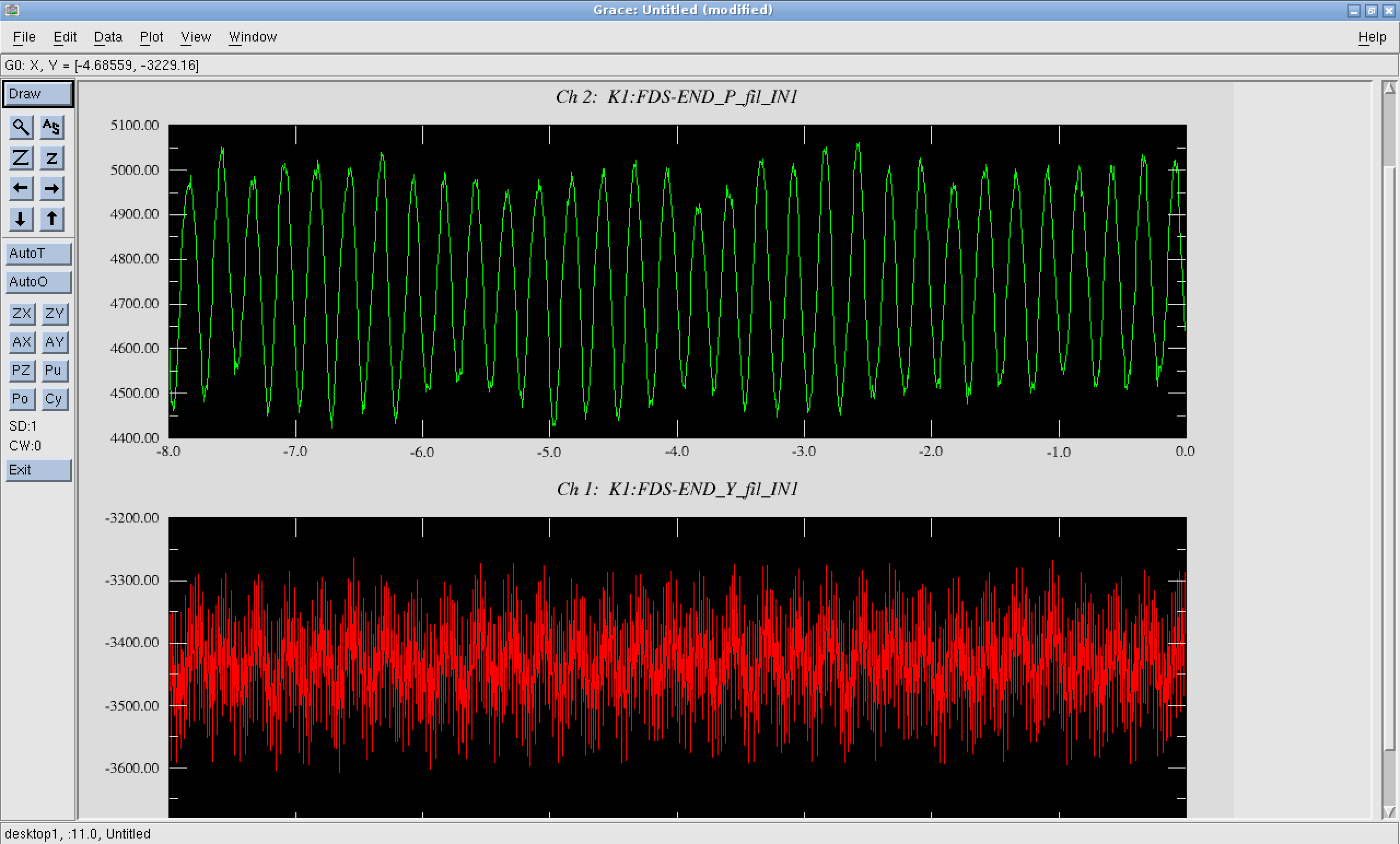
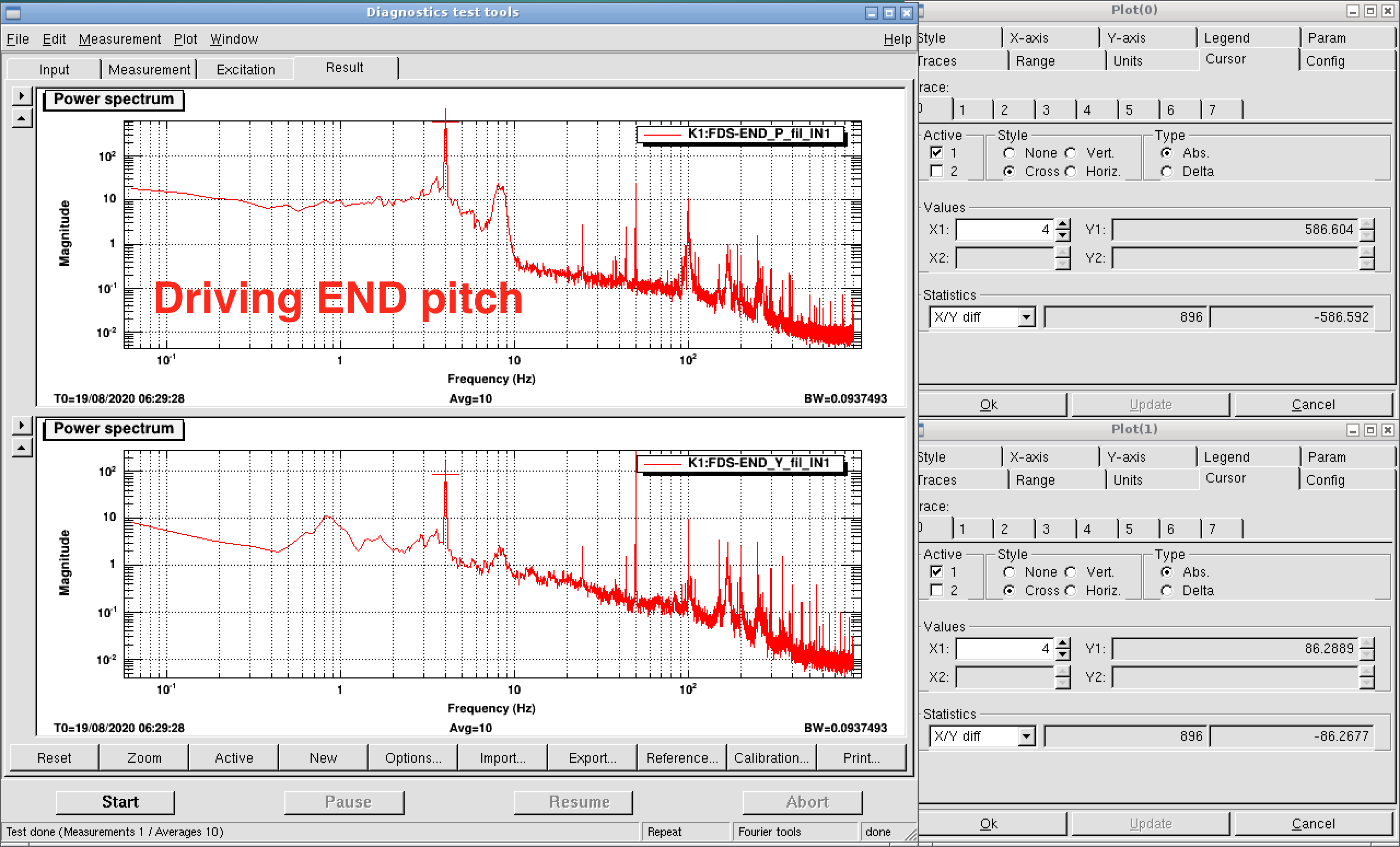
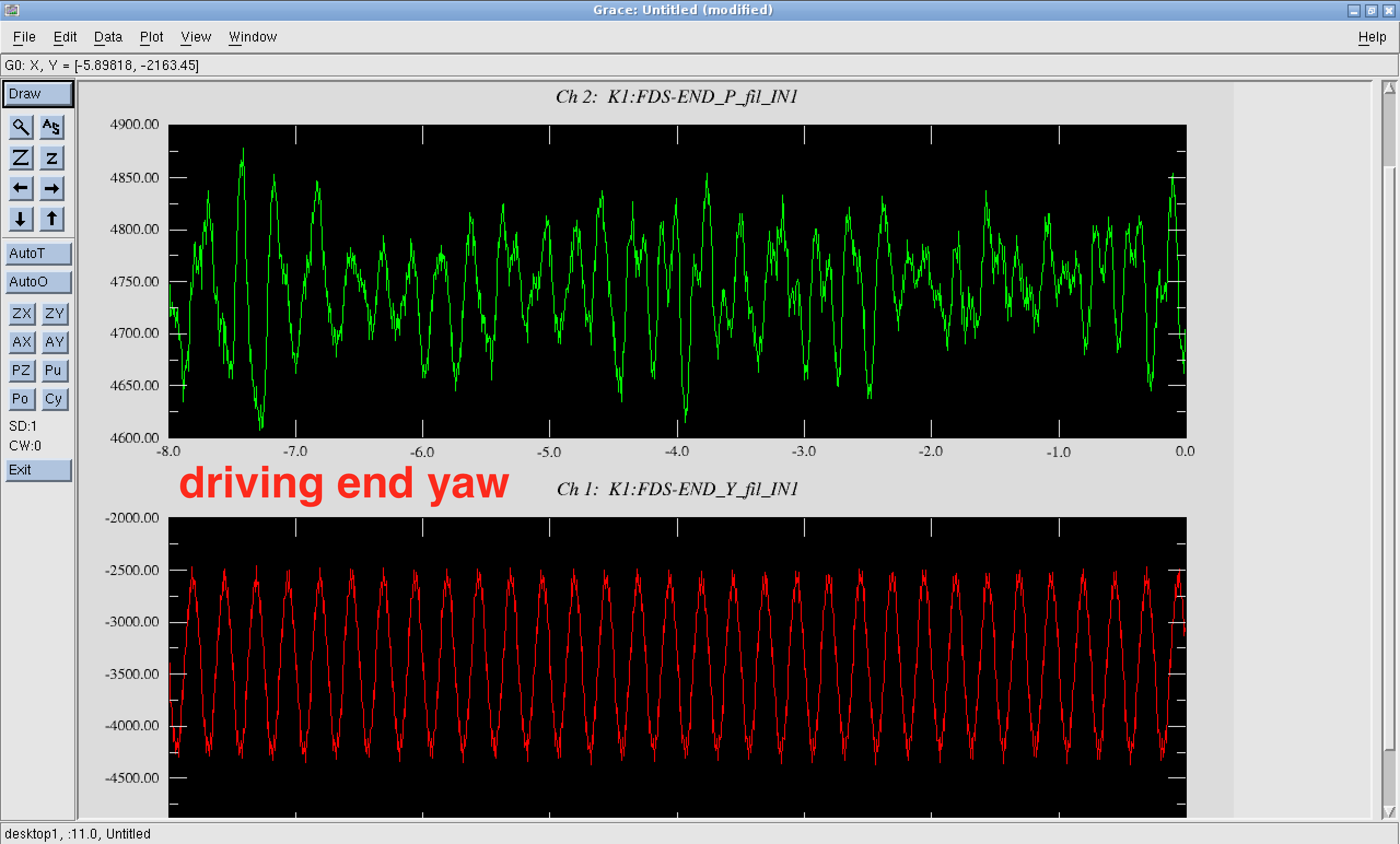
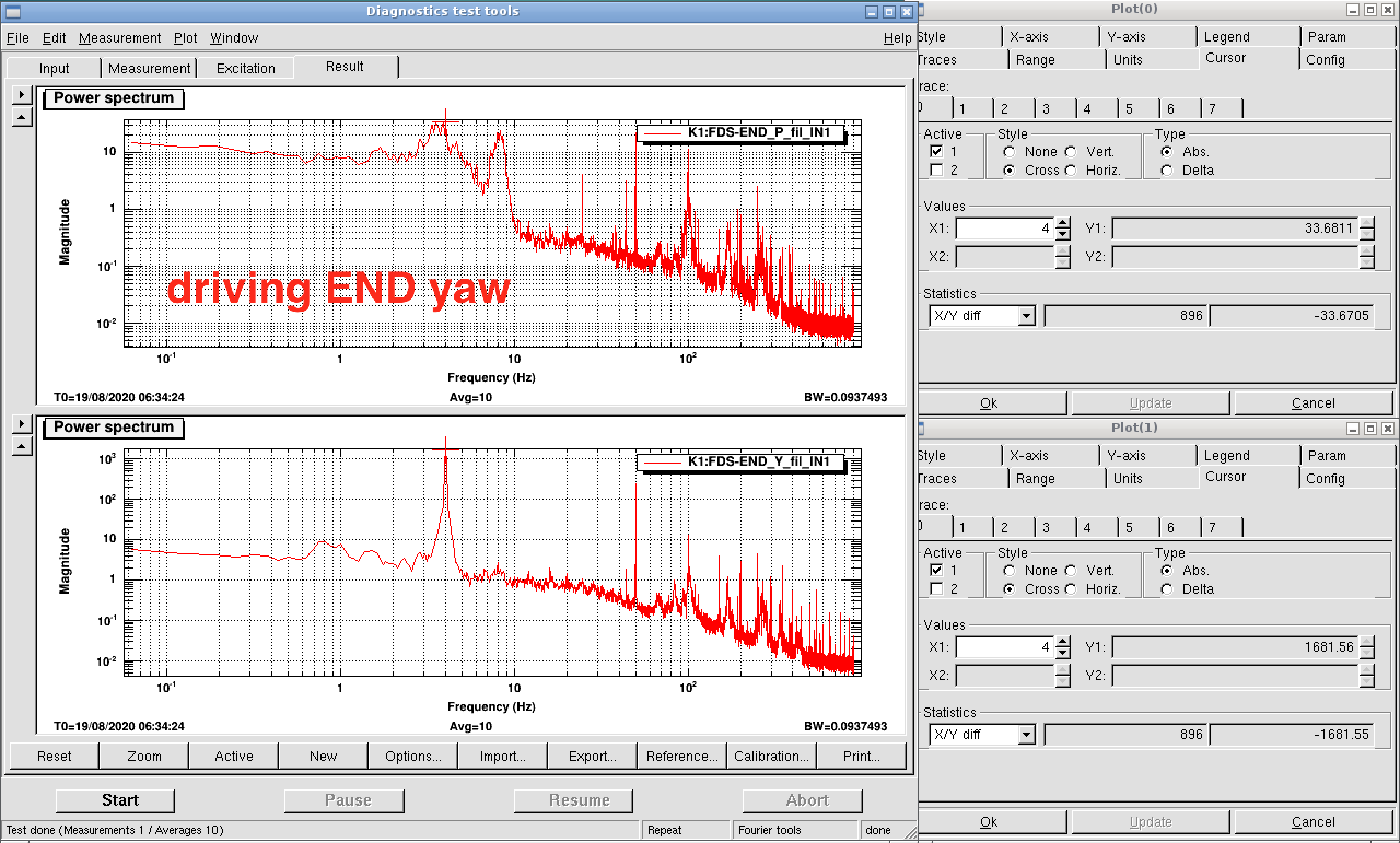
2. The second test was to send directly the pitch/yaw driving signal. After that, we checked the time series and also the spectrum. (figure 9-12)
| pitch to yaw coupling | 15% |
| yaw to pitch coupling | 2% |
Images attached to this report
Comments related to this report
Let's also check driving for INPUT to compare.